
2009
自分でも作れて、知的所有権にも縛られず、安価で簡単に作れる小型ロボットを構想していました。しかし、電子工作的な知識はほとんどありませんでした。 しかし、ArduinoやGainerの登場で、Arduinoを使用した電子工作の情報もインターネットで多く見る事ができるようになり、自分でも作れそうな感じがして、情報を集めだしました。
また、あるとき100円ショップのキャンドウに行ったときに、売っていた乾燥椎茸入れケースと、レンジマグカップを組み合わせるとロボットのように見えました。ロボットはこれらを筐体にして作ろうと思いましたが、どのように作ったらよいのか試行錯誤でした。はじめはGainerを使っていてその後Arduinoに切り替えました。
2010
I tried to make prototype. In that day, it had no name.
It had a small crawler and small PC in the body.
このころは、足にクローラを用いていました。
このロボットにまだ名前はなく
内部に小型PCをいれるのに苦労していました。

2011
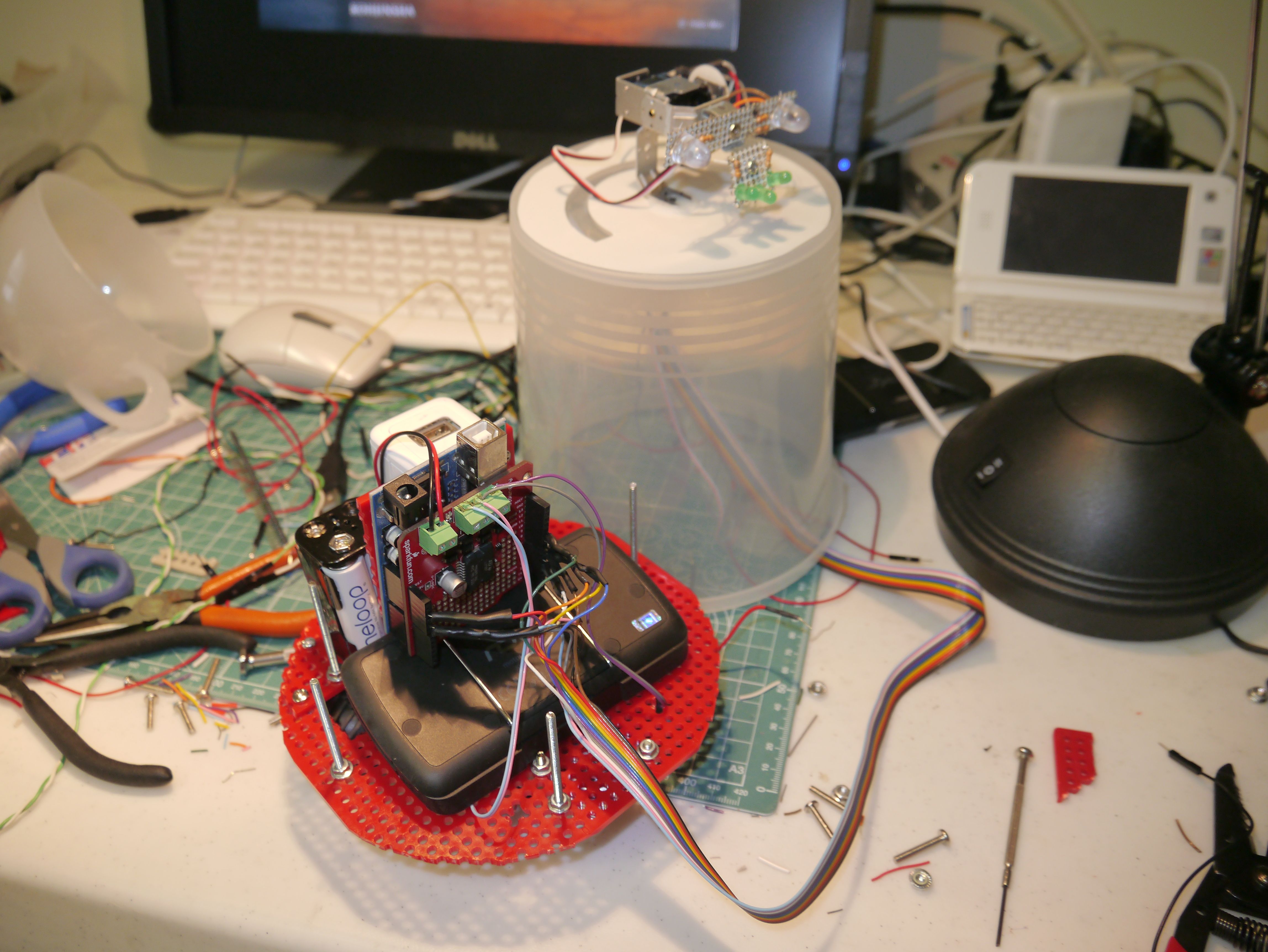
Set LEDs as the eyes and mouse and rotated with its head by servo.
頭部にLEDの目と口がついて、サーボモーターで頭部ごと旋回できるようになりました。
しかし、小型PCも積んでいるので、模型用のクローラでは加重に耐えられず、
クローラーが走行中に外れるトラブルに見舞われました。

The robot made a debut at Make Tokyo Meeting.
Make Tokyo Meetingにロボットをはじめて出展しました。

2012
アメリカ インディアナ州立大学のHuman Robot Interaction研究室に客員研究員として滞在しました。
ロボットの材料、道具一式をアメリカに輸送して、大学の研究室でロボットの開発を継続しました。
ここでの経験がロボット開発の大きな転機になりました。


アメリカでこのロボットのことを知ってもらうために産まれた名前がマグボットでした。
このときのマグボットは、小型PCを内部にいれるのはあきらめ、かわりにMacに、XBeeでMacとArduino無線でつなぎ、
音声は、Macの音声合成を使用して、音は、Bluetoothスピーカーをマグボットに内蔵してMacから音を飛ばしていました。
また、タイヤを付けて走行できるようにしていましたが、マグボットの重量が重くなってタイヤが空回りすることが多くなりました。
インディアナ大学の大院生の手伝ってもらって、Maker Faire Detoroit 2012にマグボットを出展してブルーリボンを4ついただきました。


2013
帰国して、
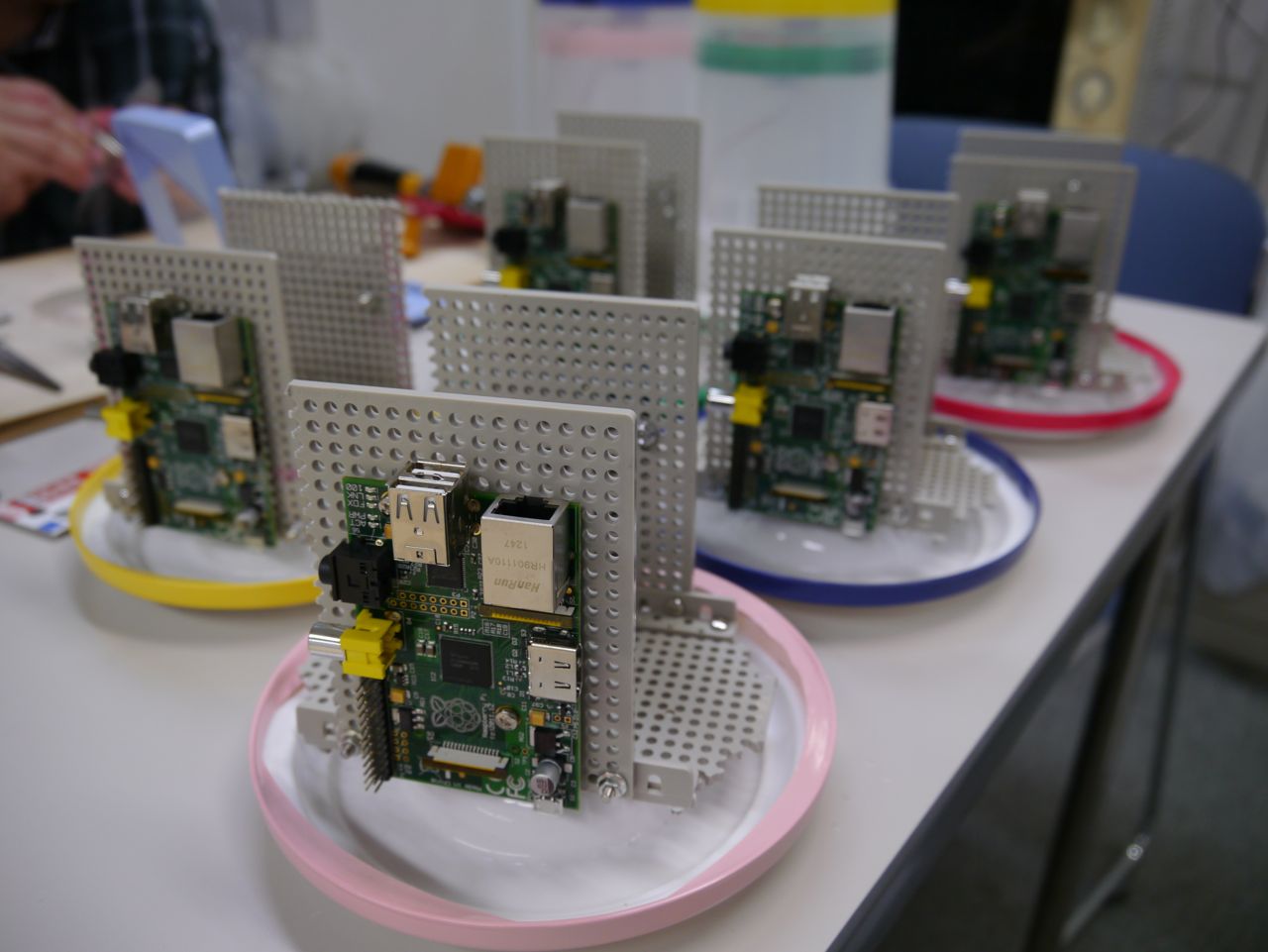
これまでMac内のサーバーや、音声合成を使用していましたが、Raspberry Piの登場で、これらの機能をRaspberry Piの移植してマグボットに内蔵することにしました。Rubyで作ったWebSocketサーバーがRaspberry Piに移して一発で動いた時には感動しました。音声合成もOpen Jtalkに切り替えました。
それでもオートログインもDHCPサーバー接続もできなくて、起動時にいちいちモニターとキーボード、マウスを使って設定していました。
このマグボットのサイトを開設しました。
足のタイヤも思い切って取り除きました。重量の問題、コストダウン、作りやすさ、AC電源や外部スピーカーで動かせるようにするためでした。
オートログインもDHCPサーバー接続もできなくて、起動時にいちいちモニターとキーボード、マウスを使って設定していました。

2014
頭部の透明なマグカップは100円ショップから姿を消して生産中止と思われ、驚いたのですが、メーカーが輸出用に色違いのものを生産していることを調べて教えてくださった方がいて、マグカップがカラーになりました。
ソフトの公開、3Dプリンターなどでの部品製作、専用基板の製作などを行うようになりました。
山梨英和大学の杉浦先生のご協力でSCRATCHからマグボットが制御できるようになりました。
Raspberry PiをType BからB+に対応しました。
Raspberry PiのDHCPサーバー接続に対応しました。
